2025 AIChE Annual Meeting
(178d) Reconciling Gap Distance Predictions Via Theoretical and Experimental Analyses of Magnetic Janus Rollers
Authors
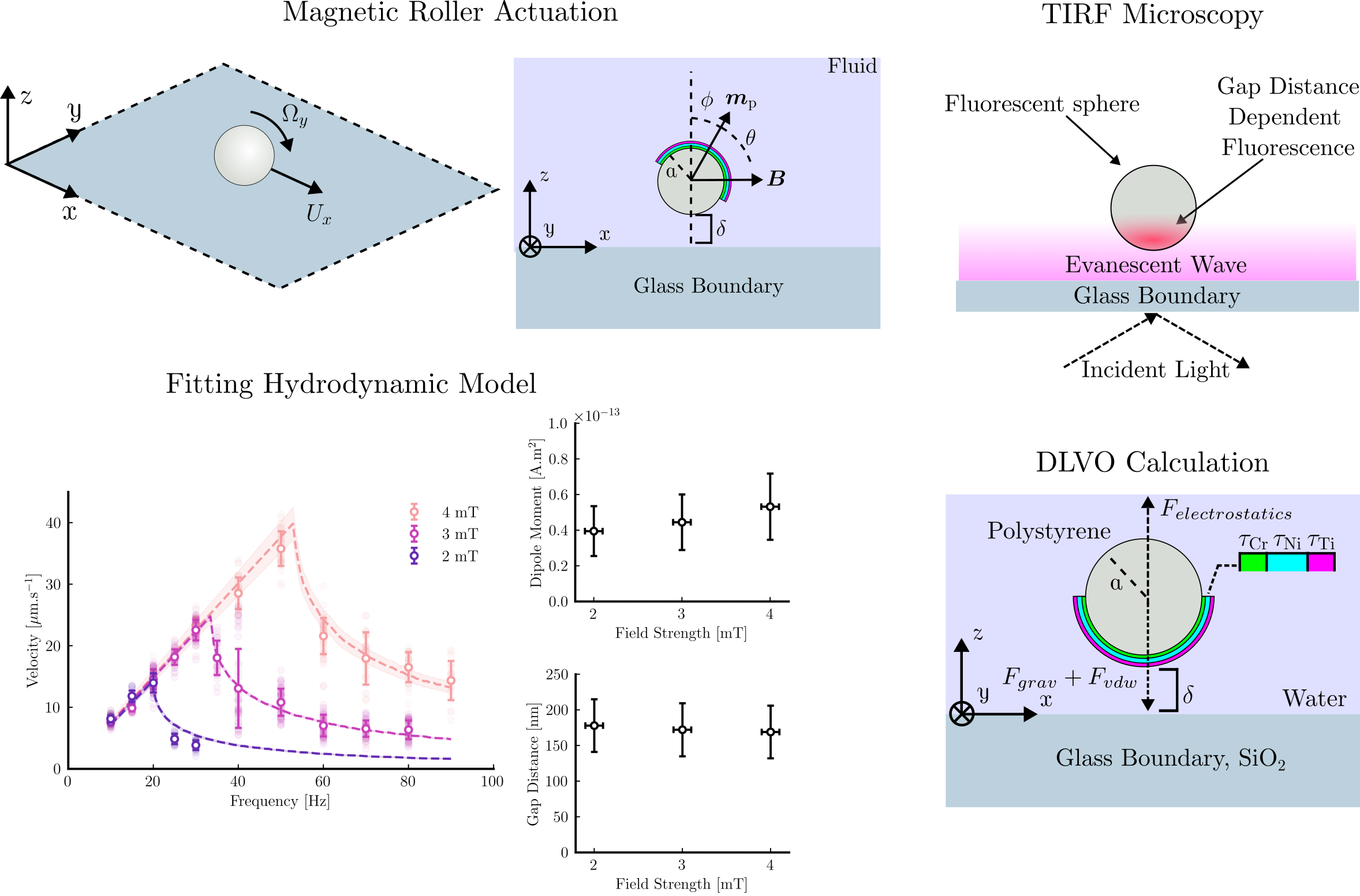
In these systems, a key characterization step involves measuring the translation velocity as a function of the frequency of the rotating magnetic field. Typically, the speed increases linearly as a function of the rotating field frequency up to a critical frequency, before decreasing. The performance of magnetic rollers, i.e. the relationship between velocity and frequency, depends on physical parameters of the system, namely the gap distance between the sphere and boundary and the magnitude of the dipole moment. The gap distance can be estimated via i) total internal reflection fluorescence (TIRF) microscopy, ii) fitting the velocity to a microhydrodynamic mobility framework, or iii) by conducting a DLVO force balance on the particle in the direction normal to the boundary. The dipole moment can be measured with a vibrating sample magnetometer or extracted from the mobility framework fit. Despite widespread use of magnetic rollers, agreement between these techniques, particularly for the gap distance measurements, remains to be demonstrated. This lack of metrological agreement limits the ability to make informed design decisions that may improve the performance of magnetic rollers for a particular application.
In this work we attempt to demonstrate agreement between these measurement techniques. We began by fabricating magnetically functionalized spherical Janus microrollers. We first deposited a submonolayer of 5 micron polystyrene spheres onto a glass microscope slide. We used electron beam evaporation to deposit sequential thin films of Chromium (thickness: 10nm, purpose: polymer-metal adhesion), Nickel (thickness: 30nm, purpose: magnetic responsiveness), and Titanium (thickness: 10nm, purpose: capping layer). We then actuated the rollers with rotating magnetic fields (magnitude: 2-4 mT, frequency: 10-100 Hz) in DI water on glass boundaries and used microscopy to measure the velocity of the spheres as a function of field frequency. We fit these curves to a microhydrodynamic mobility model that balances applied magnetic torque with fluid drag to determine the gap distance and dipole moment of the rollers. We then compared our calculated gap distance to separate calculations of the gap distance using DLVO theory and measurements made via TIRF microscopy. Additionally, we compared our calculated dipole moments to measurements made with a vibrating sample magnetometer. To provide further confidence in our techniques and ensure predictive robustness for a broad variety of use cases, we test the comparison between these independent calculations and measurements upon changing to the size of the rollers, increasing the salt concentration in the fluid medium, and upon adding an additional interaction in the form of a magnetic boundary. Ultimately, our findings present a set of theoretical frameworks and experimental techniques to determine the values of both the gap distances and magnetic dipole moments that parametrize the dynamics of magnetic Janus rollers. Our work will enable scientists and engineers to make better informed design decisions about their magnetic rollers systems to improve performance depending on the use case.