2025 AIChE Annual Meeting
(171b) Geometry-Conditioned Graph Neural Networks for Multiphase Flow in Complex Geometries
Authors
Even small variations in lip curvature, chamber width, or exit shape can significantly alter the breakup characteristics and droplet size distribution [4]. Capturing such behaviours is computationally demanding, as it involves multiphase phenomena, interfacial instabilities, and phase transitions. Accurately resolving these effects requires solving a set of partial, nonlinear differential equations coupled with interface tracking methods, often on extremely fine or adaptive meshes [5-7]. These requirements render iterative design, real-time control, and uncertainty quantification using computational fluid techniques (CFD) prohibitively expensive.
To overcome these costs while retaining geometric sensitivity, we explore geometry-informed representation learning as a reduced-order modelling approach. While coordinate-based neural fields and implicit representations can encode shape, they often generalise poorly across different mesh topologies [8]. Similarly, convolutional neural networks (CNNs) require structured grid inputs and struggle with adaptive meshes or geometrically diverse domain [9]. In contrast, Graph Neural Networks (GNNs) can operate on unstructured graph data derived from CFD meshes, where nodes represent points and edges, encoding spatial connectivity. This enables GNNs to capture local relationships through neighbouring nodes and generalise across design variations.
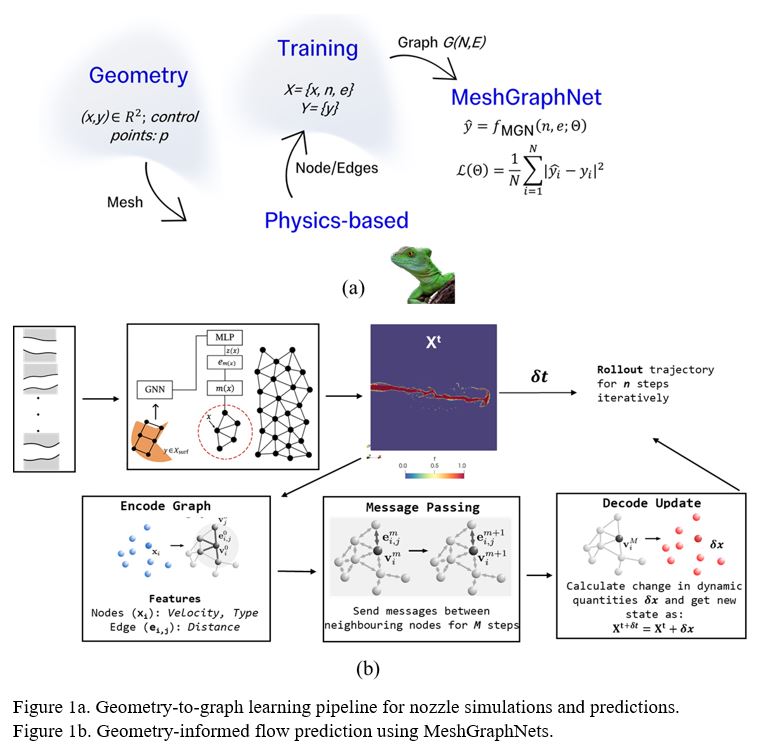
MeshGraphNets (MGNs) are a specific class of GNNs designed to learn mesh-based physical simulations [10]. They use an encode–process–decode architecture, where physical inputs are mapped to latent features, processed through message-passing layers, and decoded to predict future states. Temporal rollout is achieved by using current predictions as inputs for the next time step. MGNs incorporate geometry explicitly via coordinates and edge vectors, and implicitly via mesh structure. Boundary conditions are encoded using one-hot markers for walls, inlets, and outlets etc.
We apply this framework to a 2D nozzle atomisation case simulated with the Basilisk solver, using adaptive octree refinement with nine levels. Nozzle geometries are defined via Non-uniform rational basis spline (NURBS) curves with randomly sampled control points and weights. The parameter space spans upper curvature with p1 ∈[0.05,0.2], lower curvature p2∈[−0.2,−0.05], and width scaling w∈[0.5,1.5], defined over the axial length x∈[0,0.7]. The generated NURBS curves are embedded into Basilisk solver using a signed distance function. Simulations track liquid injection into gas medium, resolving interface dynamics, and breakup patterns using the Volume of fluids (VOF) model. Each simulation outputs transient .vtk files every 0.1 seconds, containing velocity, pressure, volume fraction, and a marker field indicating domain boundaries.
These outputs are converted into graphs using the Deep Graph Library (DGL), where each node corresponds to a mesh cell and edges are constructed based on local connectivity. Node features include velocity components, volume fraction, spatial coordinates and marker values. Edge features include Euclidean distances. Each simulation yields a graph with ~4K–12K nodes depending on geometry and refinement. Figure 1a shows the pipeline.
Despite their strengths, MGNs encounter specific limitations in nozzle applications: (1) message passing is inherently local, limiting long-range geometric reasoning; (2) deeper GNNs tend to over-smooth node features; and (3) most critically, small but important wall deformations are not reflected in the node coordinates, as these coordinates with the nozzle, change minimally across different geometries.
To address the GNN’s inability to distinguish between nozzle shapes, we develop a geometry-aware conditioning strategy that combines both structural and feature-level enhancements. First, we augment the graph with bipartite connections between the nodes in the nozzle domain and the fluid domain. Specifically, we introduce additional edges from the nozzle domain nodes to selected fluid-region nodes. This enables direct message passing, allowing the model to explicitly learn how geometric features influence downstream dynamics.
Additionally, we compute a latent shape embedding zshape for each nozzle by encoding its boundary coordinates using a multilayer perceptron (MLP). This latent vector serves as a compact, learned representation of the geometry. We inject this embedding into the graph at the input layer by concatenating it with each node’s feature vector via a spatial MLP that broadcasts geometric context across the graph. This approach offers an indirect but expressive conditioning mechanism that integrates geometric information without modifying the mesh topology or connectivity. Together, these two methods enable the GNN to account for subtle yet impactful geometric variations and improve predictive fidelity across a wide range of nozzle shapes (Figure 1b).
Our integrated framework demonstrates strong performance in flow prediction. On a separate test set of 10 unseen nozzle geometries, the GNN surrogate achieves low mean squared error in predicting velocity and volume fraction fields compared to ground-truth Basilisk simulations. Moreover, the GNN provides a 100× speedup over CFD, enabling real-time inference and rapid design space exploration. This combination of speed and geometric sensitivity opens new possibilities for data-driven design, optimisation, and in-situ flow control not only in spray nozzles, but also in a wide range of geometry-dependent systems in chemical engineering, from microreactors and mixing chambers to separation devices and advanced delivery platforms.
References
[1] E. Kehagia, P. Papakyriakopoulou, and G. Valsami, “Advances in intranasal vaccine delivery: A promising non-invasive route of immunization,” Vaccine, vol. 41, no. 24, pp. 3589–3603, 2023.
[2] P. Acharya, T. Burgers, and K.-D. Nguyen, “A deep-learning framework for spray pattern segmentation and estimation in agricultural spraying systems,” Scientific Reports, vol. 13, no. 7545, 2023.
[3] P. Henriques, A. Fortuna, and S. Doktorovová, “Spray dried powders for nasal delivery: Process and formulation considerations,” Eur. J. Pharm. Biopharm., vol. 176, pp. 1–20, 2022.
[4] A. H. Lefebvre and V. G. McDonell, Atomization and Sprays, 2nd ed. Boca Raton, FL, USA: CRC Press, 2017.
[5] D. Fuster et al., “Simulation of primary atomization with an octree adaptive mesh refinement and VOF method,” Int. J. Multiphase Flow, vol. 35, no. 6, pp. 550–565, 2009.
[6] E. Villermaux, “Fragmentation,” Annu. Rev. Fluid Mech., vol. 39, no. 1, pp. 419–446, 2007.
[7] T. Traverso, T. Abadie, O. K. Matar, and L. Magri, “Data-driven modeling for drop size distributions,” Phys. Rev. Fluids, vol. 8, no. 10, Art. no. 104302, 2023.
[8] L. Serrano et al., “Operator Learning with Neural Fields: Tackling PDEs on General Geometries,” in Advances in Neural Information Processing Systems (NeurIPS), vol. 36, 2023.
[9] C. E. Heaney, Y. Li, O. K. Matar, and C. C. Pain, “Applying Convolutional Neural Networks to data on unstructured meshes with space-filling curves,” Neural Netw., vol. 175, Art. no. 106198, 2024.
[10] T. Pfaff, M. Fortunato, A. Sanchez-Gonzalez, and P. W. Battaglia, “Learning mesh-based simulation with graph networks,” in Proc. Int. Conf. Learn. Representations (ICLR), 2021.
[11] L. Pegolotti, M. R. Pfaller, N. L. Rubio, K. Ding, R. Brugarolas Brufau, E. Darve, and A. L. Marsden, “Learning reduced-order models for cardiovascular simulations with graph neural networks,” Comput. Biol. Med., vol. 168, Art. no. 107676, 2024.