2025 AIChE Annual Meeting
(32e) Bio-Inspired Self-Propelling Microrobots for Enhanced Transport and Targeted Drug Delivery
Author
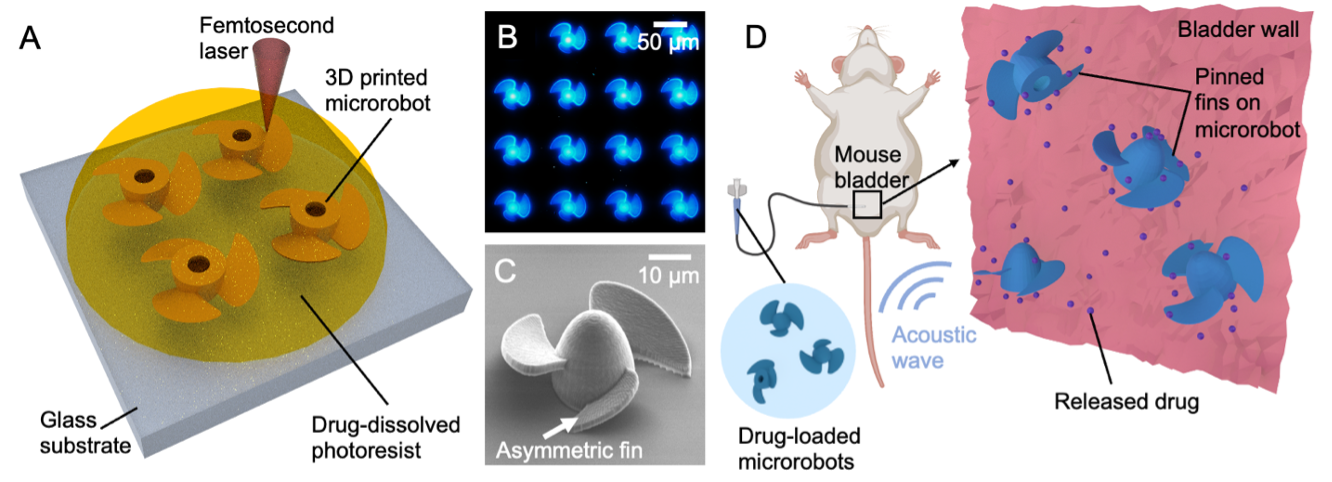
Furthermore, I will demonstrate the transformative potential of these self-propelling particles as a medical device. They are designed to navigate non-linear trajectories within the confines of a mouse bladder, effectively anchoring themselves to the epithelium and facilitating the controlled release of therapeutic drugs. Utilizing their fast speed and sharp fins, these bubble-based microrobots, equipped with encapsulated drugs, mechanically adhere to the bladder epithelium, withstanding the shear stresses associated with urination. The sustained drug release mechanism showcased in this study effectively activate immune cells, surpassing the performance of free drug controls. This system offers a promising strategy for deploying microrobots to efficiently explore large volumes, securely attach to soft tissue boundaries, and administer drug therapies over extended periods, holding great potential for addressing a wide range of diseases.