2023 AIChE Annual Meeting
(509f) A QR Decomposition Based Parity Space Fault Diagnosis Method for Systems with Numerous Faults
This paper aims to propose a uniform pattern for residual generator designing in the case where fault number is larger, which is very important to complex industrial chemical systems and processes. The approach expands the application of parity space based method to a situation with more constraints.
In this paper, QR decomposition is introduced to parity space approach to obtain an upper triangular structure generator. With the triangular structure, the -th entry in the residual vector is only influenced by the -th entry to the end of fault vector. It could be concluded that if the first to -th residual entry is abnormal, occurring fault(s) must be included in faults which are linked to the first to -th fault entry.
The whole technique could be divided into two steps: firstly, we apply row operation on the fault vector and column operation on the initial fault incidence matrix; secondly, QR decomposition is done on the new incidence matrix. The new residual is monitored and above procedures are repeated under different row and column operations.
By exhaustion on the row operation, the number of abnormal residual entries would reach minimum. Then all occurring faults are traced immediately. The isolation rule is as follows: if the residual vector has the characteristic that there are anomalies in the first to -th entries and the other entries are all normal, it could be verified that the first to -th faults occur in the new fault vector which is obtained by row operation. Finally, fault detection and isolation could be realized simultaneously no matter which faults occur.
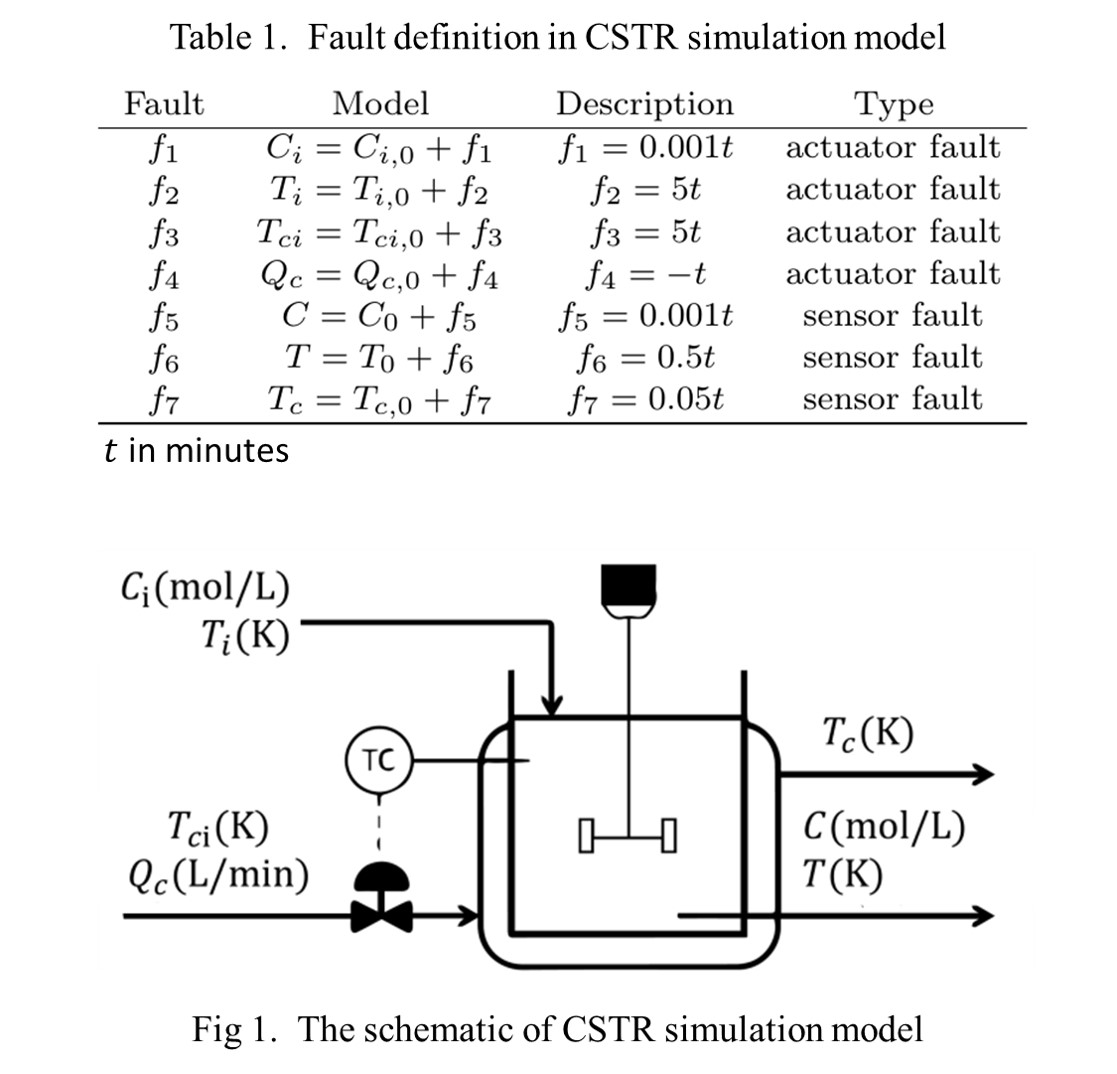
This technique is applied to the fault isolation on an exothermic first order reaction in a simulation Continuous Stirred Tank Reactor (CSTR), a typical system in FDI research [15]. The schematic of CSTR is represented in Fig.1. In this system, Ci and C are inlet and outlet concentration of reactant, Ti and T are temperature of inlet and outlet, Tci and Tc are temperature of inlet and outlet coolant, and Qc is the coolant water flow rate. C, T and Tc are thought as state variables. Those variables are also considered as measurement variables in the state space process model. The dynamic behavior are obtained from the first principle. The fault definition is introduced in Table.1. The nonlinear process model parameters in [15] are adopted. Faulty and fault-free datasets are simulated for 20 . In this paper, the nonlinear model is firstly linearized referring to [16].
The contribution of proposed approach is as follows:
- a direct and immediate approach to design the residual generator and obtain the parity matrix is proposed, together with enlightening examples as tutorials for their practical usages;
- this study presents a new approach that overcomes the limitations of the traditional parity space method in terms of the number of faults considered in the process. Specifically, the proposed method provides fault isolation conditions that are more easily satisfied for LTI systems.
Overall, this abstract proposes a targeted solution for fault isolation in the situation where the influences of faults on state are independent but the faults in the chemical processes could occur independently. The application details of this work were given via a simulation CSTR example. This work fills in the gaps of applied scenario for parity space method. By introducing QR decomposition, this work offers a universal pattern for designing a residual generator, and makes it easier to find a satisfying parity matrix.
[1] J. Chen and R. J. Patton, Robust Model-Based Fault Diagnosis for Dynamic Systems, vol. 3. Springer US, 1999. Accessed: Nov. 07, 2022. [Online]. Available: http://link.springer.com/10.1007/978-1-4615-5149-2
[2] R. Isermann, âModel-based fault-detection and diagnosis â status and applicationsâ, Annu. Rev. Control, vol. 29, no. 1, pp. 71â85, Jan. 2005, doi: 10.1016/J.ARCONTROL.2004.12.002.
[3] S. Dong, Z.-G. Wu, P. Shi, H. R. Karimi, and H. Su, âNetworked Fault Detection for Markov Jump Nonlinear Systemsâ, IEEE Trans. Fuzzy Syst., vol. 26, no. 6, pp. 3368â3378, Dec. 2018, doi: 10.1109/TFUZZ.2018.2826467.
[4] Z. Mao, Y. Zhan, G. Tao, B. Jiang, and X.-G. Yan, âSensor Fault Detection for Rail Vehicle Suspension Systems with Disturbances and Stochastic Noisesâ, IEEE Trans. Veh. Technol., vol. 66, no. 6, pp. 4691â4705, 2017, doi: 10.1109/TVT.2016.2628054.
[5] H. Cheng, J. Wu, Y. Liu, and D. Huang, âA novel fault identification and root-causality analysis of incipient faults with applications to wastewater treatment processesâ, Chemom. Intell. Lab. Syst., vol. 188, pp. 24â36, May 2019, doi: 10.1016/j.chemolab.2019.03.004.
[6] S. X. Ding, Model-Based Fault Diagnosis Techniques: Design Schemes, Algorithms and Tools. London: Springer London, 2013. doi: 10.1007/978-1-4471-4799-2.
[7] J. J. Gertler and R. Monajemy, âGenerating directional residuals with dynamic parity relationsâ, Automatica, vol. 31, no. 4, pp. 627â635, Apr. 1995, doi: 10.1016/0005-1098(95)98494-Q.
[8] J. Gertler, Fault Detection and Diagnosis in Engineering Systems. Boca Raton: CRC Press, 2019. doi: 10.1201/9780203756126.
[9] M. Zhong, Y. Song, and S. X. Ding, âParity space-based fault detection for linear discrete time-varying systems with unknown inputâ, Automatica, vol. 59, pp. 120â126, Sep. 2015, doi: 10.1016/j.automatica.2015.06.013.
[10] J. Gertler and M. Staroswiecki, âSTRUCTURED FAULT DIAGNOSIS IN MILDLY NONLINEAR SYSTEMS: PARITY SPACE AND INPUT-OUTPUT FORMULATIONSâ, IFAC Proc. Vol., vol. 35, no. 1, pp. 341â346, Jan. 2002, doi: 10.3182/20020721-6-ES-1901.00788.
[11] J. J. Gertler, âSurvey of model-based failure detection and isolation in complex plantsâ, IEEE Control Syst. Mag., vol. 8, no. 6, pp. 3â11, Dec. 1988, doi: 10.1109/37.9163.
[12] P. M. Frank, âFault diagnosis in dynamic systems using analytical and knowledge-based redundancy: A survey and some new resultsâ, Automatica, vol. 26, no. 3, pp. 459â474, May 1990, doi: 10.1016/0005-1098(90)90018-D.
[13] M.-A. Massoumnia, âA GEOMETRIC APPROACH TO FAILURE DETECTION AND IDENTIFICATION IN LINEAR SYSTEMSâ.
[14] M.-A. Massoumnia, G. C. Verghese, and A. S. Willsky, âFailure detection and identificationâ, IEEE Trans. Autom. Control, vol. 34, no. 3, pp. 316â321, Mar. 1989, doi: 10.1109/9.16422.
[15] K. E. S. Pilario and Y. Cao, âCanonical variate dissimilarity analysis for process incipient fault detectionâ, IEEE Trans. Ind. Inform., vol. 14, no. 12, pp. 5308â5315, Dec. 2018, doi: 10.1109/TII.2018.2810822.
[16] D. Eriksson, E. Frisk, and M. Krysander, âA method for quantitative fault diagnosability analysis of stochastic linear descriptor modelsâ, Automatica, vol. 49, no. 6, pp. 1591â1600, Jun. 2013, doi: 10.1016/J.AUTOMATICA.2013.02.045.